





Система жесткого крепления отличается простотой конструкций. При таком соединении копирование рельефа в продольном направлении зависит от длины рамы, в поперечном - от ширины захвата орудия. При жестком соединении недостаточно копируется микрорельеф поля, не выдерживается постоянная глубина хода рабочих органов по ширине захвата.
Шарнирные соединения могут быть одно- и многошарнирными. Одношарнирное характеризуется тем, что стойки (рис.5, а) вместе с рабочим органом 7 и поводком 2 шарнирно связаны с брусом 1 рамы машины. Различают индивидуально-поводковую и секционную одношарнирную системы крепления. При индивидуально-поводковой системе к каждому поводку присоединяют по одному рабочему органу (лапы культиваторов для сплошной обработки почвы, а также сошники зерновых и универсальных сеялок), а при секционной - несколько рабочих органов (навесные хлопковые культиваторы, лущильники и т. д.).
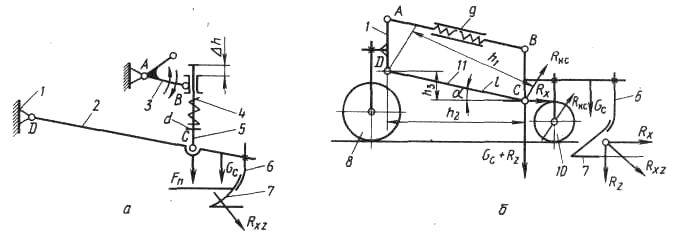
Рис.5 - Схемы крепления рабочих органов к раме:
а - одношарнирное; б - четырехзвенное; 1 - брус рамы; 2 - поводок;3 - двуплечий рычаг; 4 - нажимная пружина; 5 - штанга; 6 - стойка;7 - рабочий орган; 8 -колесо рамы; 9 и 11 - звенья параллелограммногомеханизма; 10-опорное колесо секции
Рабочий орган заглубляется под действием силы тяжести Gc секции, вертикальной составляющей реакции Rxz на рабочие органы, а также силы сжатия Fnнажимной пружины 4. Максимальная глубина ограничивается упорами штанг 5, ребордами (полозками) или каточками.
При одношарнирной системе лучше, чем при жестком креплении, копируется рельеф поля.
В четырехзвенной системе крепления (рис.5, б) стойка 6 (звено BC вместе с рабочим органом 7 прикреплена к брусу 1 (звено AD) рамы машины через поводки 9 и 11 (звенья АВ и DC). Чаще всего применяется четырехзвенная система с параллелограммным механизмом, в котором звено АВ параллельноDC, a AD параллельно ВС. Опорное колесо 10 секции копирует микрорельеф поля. Движение колеса по неровностям приводит к относительному перемещению звена ВС. При этом угол установки рабочего органа к поверхности поля не изменяется. Параллелограммная система применяется для крепления лап в пропашных культиваторах, сошников в свекловичных и кукурузных сеялках, а также в посадочных машинах. При такой системе лучше копируется микрорельеф поля и рабочие органы выдерживают заданную глубину хода.
Заглубление рабочих органов определяется силой тяжести Gc и реакцией Rxz. Положение звеньев АВ и DC механизма влияет на заглубление и на реакциюRкс, действующую на колесо.
Четырехзвенная система крепления рабочих органов более громоздкая, чем жесткая или одношарнирная, многошарнирность снижает устойчивость хода рабочих органов в горизонтальной плоскости.
Угол установки рабочих органов во всех системах крепления достигается поворотом стойки относительно поводка. В параллелограммной системе можно изменять длину верхнего звена АВ, что влияет и на угол установки.
Авторы: Сергей Зеленский, Александр Рулевский
Оставить комментарий
Для того, чтобы оставить комментарий,
зарегистрируйтесь или войдите